
Bianca Sangiovanni
Contact information
🏠 Zürich, Switzerland
📧 bianca.sangiovanni93@gmail.com
Areas of interest
Robotics, deep learning, reinforcement learning, data science, machine learning
Languages
🇮🇹 Italian
🇬🇧 English
🛠️ Technical Skills
Programming languages: Python 🥇, Pyspark, Typescript, C/C++, Java, Lua, Matlab
Data Exploration and Engineering: Foundry 🥇, data processing (Pandas, Numpy, Numba) and visualization (Plotly, Seaborn), data retrieval (MongoDB, SQL)
Machine Learning: regression and classification models (ensemble models, linear regression, logistic regression, SVM, neural networks), clustering (K-Means, DBSCAN), computer vision (CNNs), reinforcement learning (continuous and discrete control, optimization), edge AI (ONNX, optimization with TensorRT), machine learning libraries (Scikit-learn, Pytorch, TensorFlow)
Software and tools: Matlab, Simulink, robotic simulators (V-Rep, Epson RC+, ROS), containerization (Docker)
Web technologies: HTML, CSS, Markdown
Productivity: Microsoft Office Suite, Google Workspace, Open Office, LATEX
Graphics and multimedia: illustration and graphics editing (Inkscape, GIMP), 3D modelling (Blender, Cinema4D), video and audio editing

📇 About Me
Hi! Welcome to my personal webpage 👋 I'm Bianca Sangiovanni, and here you can find some information about me. Since 2021 I have been working as a data scientist for consulting practices. During my experience I have contributed to a diverse array of machine learning and end-to-end AI projects across different industries (e.g., insurance, consumer goods, manufacturing) .
In May 2021, I obtained my Ph.D. in Deep Reinforcement Learning for Robot Control from the University of Pavia (Italy), under the supervision of Professor Antonella Ferrara. As a Ph.D. student, I focused my reserach on the topics of robotics and reinforcement learning. My Ph.D. thesis, titled "Self-configuring Robotic Systems: the use of Deep Reinforcement Learning as a tool for Industrial Manipulators" specifically deals with potential applications of deep learning in the context of decision-making and control for robotic systems. During the course of my doctoral studies, I had the opportunity to work with incredibly brilliant researchers from all around the world and enrich my knowledge in the fields of machine learning, robot control and identification of complex dynamical models, as well as improve my coding and simulation skills (more details here). Furthermore, I had the privilege to mentor students for their Master's projects, hold seminars and lectures for the faculty, and present at national and international conferences. You can check out my complete list of peer-reviewed publications on my Google Scholar profile.Previously, I completed my Bachelor's and Master's degrees in Computer Engineering also from the University of Pavia, with a specialization in Embedded and Control Systems.
In my free time, I enjoy listening to podcasts, going for long walks in the nature, and experiment with game development tools, especially 3D modelling softwares. I am a huge TV show nerd (Better Call Saul is my all time favorite). 🍿
💼 Professional Experience
Data & AI Engineer
Unit8, Zürich
2025 - present
Activity: developing end-to-end AI solutions (Foundry)
Senior Data Scientist
Capgemini Engineering, Italy
2021 - 2024
Activity: designing and developing machine learning models for industry and R&D applications; analyzing large datasets, performing feature analysis and feature engineering; monitor performance and supporting deployment into production environments; writing proposals for calls for application and pre-sale presentations.
Ph.D. Researcher
University of Pavia, Italy
2017 - 2021
Activity: conducted and coordinated research activities in the fields of robot control, deep reinforcement learning, and automation at the ICDS Laboratory (University of Pavia); co-authored and presented scientific publications for international conferences and journals.
Teaching Activity
University of Pavia, Italy
2018 - 2020
Activity: prepared and presented lectures on motion planning for industrial robotics to graduate students for the M.Sc. course Robot Control; served as a tutor to undergraduate students for the B.Sc. course Automatic Control.
🎓 Education
Ph.D. in Electronics, Computer Science and Electrical Engineering
University of Pavia, Italy
2017 - 2021
Research areas: robot control, deep reinforcement learning, collaborative robotics, human-robot interaction, automation
Thesis title: Self-configuring Robotic Systems: the use of Deep Reinforcement Learning as a tool for Industrial Manipulators (pdf)
Advisor: Professor Antonella Ferrara
Abstract
The Thesis aims to present different examples of self-configuring systems involving robotic manipulators. With self-configuring systems, we refer to systems featuring the ability to autonomously adapt their control strategy or general configuration in order to overcome possible limitations encountered during their operation. To this end, the use of Deep Reinforcement Learning (DRL), a type of machine learning that enables the system to autonomously discover the best strategy to solve a task, is discussed as a tool for decision making or for controlling robotic systems in situations in which a model-based solution is not readily achievable. End-to-End, model-free control approaches are studied and used contextually with - or alternatively to - model-based control and decision strategies. Specifically, the work focuses on industrial manipulators operating in uncertain environments to perform motion and collision avoidance tasks. For robot motion, a novel switched-structure scheme to achieve both centralized and decentralized control, using the perturbation estimation feature of the Integral Sliding Mode controller, is presented and discussed in detail. Different approaches for decision-making are illustrated. For collision avoidance, a framework enabling end-to-end, model-free control of robotic manipulators operating in cluttered environments is introduced and tested on several case studies. A novel hybrid algorithm combining DRL-based strategies and conventional planning methods is proposed. The presented approaches are then deployed on different robotic systems, and experimental results are reported.
Visiting Researcher
University of Zurich/ETH, Switzerland
March - September 2019
Research areas: deep learning, aerial robots
Visiting period during my Ph.D. at the Robotics and Perception Group, Institute of Neuroinformatics (University of Zurich and ETH Zurich).
Master's Degree in Computer Engineering
University of Pavia, Italy
2015 - 2017
Thesis title: Virtualization, simulation and automatic training for robotic systems
Advisors: Professor Antonella Ferrara, Professor Marco Piastra
Abstract
The Thesis investigates the process of virtualization and simulation of industrial robotic systems, in the field of collaborative robotics. A virtual environment consisting of a robot manipulator working in the presence of moving obstacles is used to test the performance of a model-free Deep Reinforcement Learning algorithm for collision avoidance, producing promising results.
Bachelor's Degree in Computer Engineering
University of Pavia, Italy
2012 - 2015
Thesis title: Revamping of a laboratory plant for level control
Advisor: Professor Lalo Magni
Abstract
The Thesis reports the laboratory activity for the revamping of an hydraulic plant, used in the undergraduate courses of Automatic Control and Fundamentals of Control Theory.
🔬 Research
Robot Collision Avoidance with Deep Reinforcement Learning
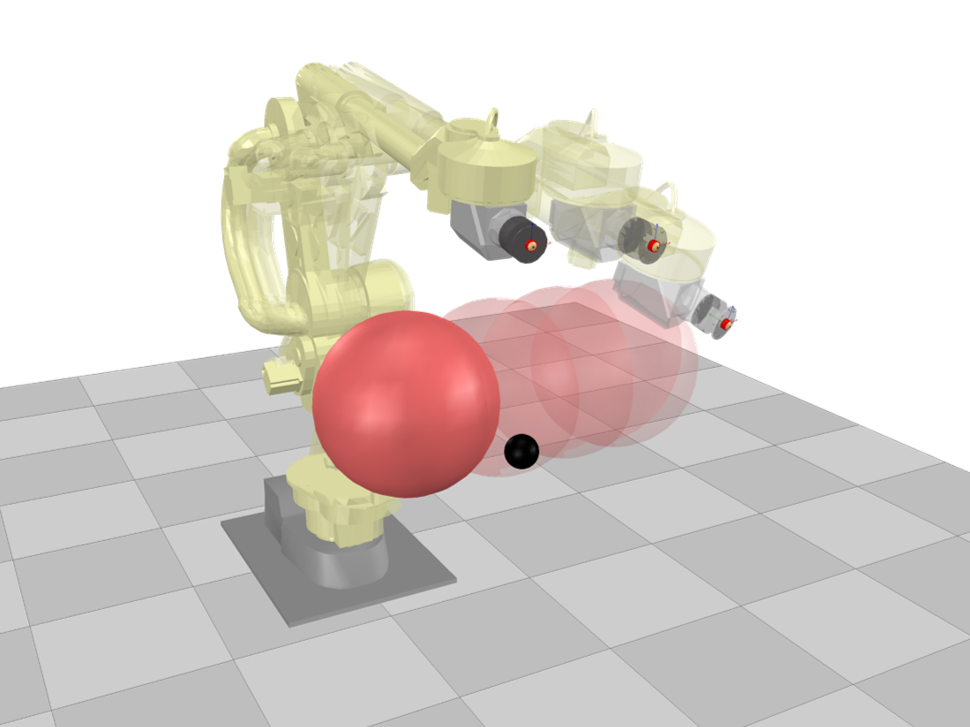
A novel approach based on DRL, which allows end-to-end, model-free control of a robot operating in a cluttered environment was developed to perform collision avoidance of moving obstacles. After defining the best suitable reinforcement learning framework, which produced promising results in terms of task completion and performance, the effects of the so-called transfer learning applied to different considered scenarios; several robotic settings, operating under different conditions, were reproduced in simulation and used to validate the proposed control approach. In addition to the end-to-end strategy, a hybrid dual-mode algorithm that combines conventional motion planning techniques and DRL-based control was introduced. The proposed solution aims to improve the tracking performances of the robot manipulator while allowing model-free control for collision avoidance. A switching metric, which confers self-configuring capabilities to the considered robotic system, is used to define the best possible approach. This allowed to obtain a more reliable motion of the manipulator and deploy the proposed approach to a real system. 🎬 Video
Publications on the topic
- B. Sangiovanni, A. Rendiniello, G.P. Incremona, A. Ferrara, and M. Piastra. Deep reinforcement learning for collision avoidance of robotic manipulators. In 2018 16th European Control Conference (ECC), pages 2063–2068. Lymassol, Cyprus, July 2018.
- B. Sangiovanni, G. P. Incremona, M. Piastra, and A. Ferrara. Self-configuring robot path planning with obstacle avoidance via deep reinforcement learning. IEEE Control Systems Letters, 5(2), pages 397–402, 2021.
- M. Rubagotti, B. Sangiovanni, A. Nurbayeva, G.P. Incremona, and A. Ferrara. Shared Control of Robot Manipulators With Obstacle Avoidance: A Deep Reinforcement Learning Approach IEEE Control Systems Magazine 43 (1), pages 44-63, 2023.
Switched-structure Motion Control For Industrial Manipulators
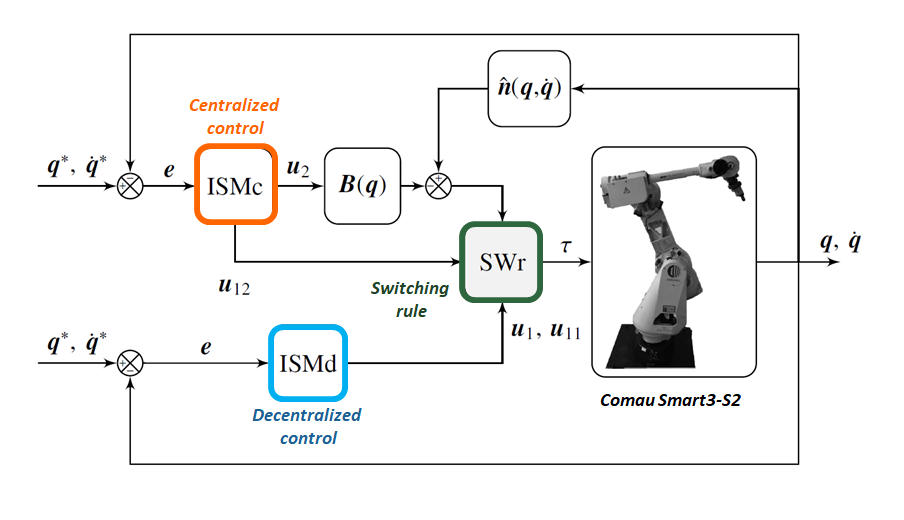
A novel switched structure control scheme based on Integral Sliding Mode control was designed to allows on-line change between a centralized approach and a decentralized one, in order to control the motion of a robot manipulator. The approach has been tested on different types of manipulators, characterised by different types of uncertainties regarding their dynamical model. The same switched-structure control scheme has then been adapted in order to enable online decision-making with an agent trained with DRL. The proposed approach aims to bypass an a-priori choice of the control scheme for systems operating in uncertain environments, with variable working conditions.
Publications on the topic
- A. Ferrara, G.P. Incremona, and B. Sangiovanni. Integral sliding mode based switched structure control scheme for robot manipulators. In 2018 15th International Workshop on Variable Structure Systems (VSS), pages 168–173. Graatz, Austria, 2018.
- B. Sangiovanni, G.P. Incremona, A. Ferrara, and M. Piastra. Deep reinforcement Learning based self-configuring integral sliding mode control scheme for robot manipulators. In 2018 57th IEEE Conference on Decision and Control (CDC), pages 5969–5974, Miami Beach (FL), USA, December 2018.
- A. Ferrara, G.P. Incremona, and B. Sangiovanni. Tracking control via switched integral sliding mode with application to robot manipulators. Control Engineering Practice, 90, pages 257–266, 2019.
🏆 Awards
Cesare Angelini Award for Young Researchers
Issued by Lions Club Pavia - Le Torri
2019
My research activity on Deep Reinforcement Learning for model-free collision avoidance of industrial manipulators was awarded the Cesare Angelini Award for young researchers from the University of Pavia. The project was judged by a committee of Professors from the University of Pavia and members of the Lions Club Pavia, chaired by Professor Carlo Alberto Redi.
📰 Press release (in italian)
Epson Europe «Win-A-Robot» Contest
Issued by Epson Europe
2019
The proposal "Deep Learning for Safe Physical Human-Robot interaction" was one of the six winners of the «Win-A-Robot» competition by Epson Europe. The application was judged in terms of innovation, educational value, skills development, unique robot usage and sustainability by a board of experts. The team was awarded with a 6-axis robotic manipulator EPSON VT6
📰 Press release (in italian);
📰 News on the university website